永凱智能專注自動噴涂設備制造
工業機器人 · 廢氣處理設備 · 全套涂裝線設備 · 數控噴涂機
186-6599-8326(劉先生)


聯系人:劉先生
手機:18665998326
QQ:101061032
E-mail:[email protected]
地址:深圳市寶安區沙井街道壆崗社區崗頭路13號B區I館102
噴涂機器人本體主要由驅動系統、機械系統、感知系統、 控制系統四個系統組成。 機械系統又叫操作機,是工業機器人的履行機構,可分紅基座、腰部、臂部、腕部和手部。主要介紹一下噴涂機器人本體結構的特色與要求。
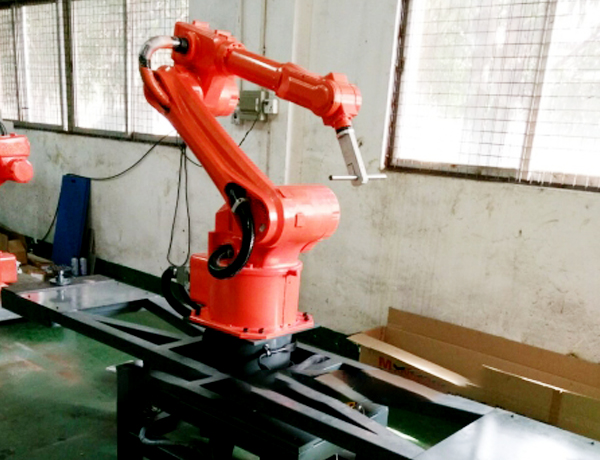
一、噴涂機器人本體結構特色
1.噴涂機器人操作機能夠簡化成各連桿首尾相接、 末端開放的一個開式運動鏈,操作機的結構剛度差, 并隨空間位姿的改變而改變;
2. 操作機的每個連桿都具有獨立的驅動器,連桿的 運動各自獨立,運動更為靈敏。 一般的連桿機構,有1-2個原動件,各連桿間的運動 是互相束縛的;
3. 連桿驅動扭矩改變雜亂,和履行件位姿相關。桿的驅動屬于伺服控制,因而對機械傳動系統的剛度、空隙和運動精度都有較高的要求;
4. 操作機的受力狀態、剛度條件和動態功能隨位姿 改變而改變,極易產生振動或其它不穩定現象。
二、噴涂機器人本體基本結構要求
1. 機械系統抓重一自重比盡量大 臂桿的質量小有利于改進操作機作業的動態功能, 抓重一自重比大意味著作業效率高,造價低。人類手臂的抓嚴重約為自重的3—4倍,從統計資料 看,操作機的抓重一自重比約為1/20—1/15,與 人類手臂比較,相去甚遠;
2. 結構的靜動態剛度盡可能好 結構靜動態剛度好有利于進步手臂端點的定位精度 和對編程軌跡的跟蹤精度,對離線編程至關重要。操作機具有較好的剛度,能夠添加設計的靈敏性。 比如在選擇傳感器裝置位置時,剛度好的結構允 許傳感器放在離履行件較遠的位置;
3. 進步系統的固有頻率,改進系統的動態功能。 機器人以中等速度運動時,作業頻率范圍1Hz一 20Hz,機器人的低階固有頻率5Hs一25Hs,有可能 會共振。盡可能進步操作機結構的固有頻率,避開機器人 作業時的作業頻率。